The RoboCopBot Design Team consists of William Murderous, Samuel Baked, and Andrew Esten
Parking Space DC #2
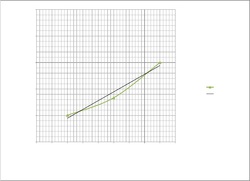
For Design Challenge 2 we had to program our robot to go a certain distance. To do this, we created a linear graph to find how far the robot travels during the times of 2, 5, and 8 seconds, and extrapolated. Our data showed this equation for the linear trend line: y=16.583x+11.75. We plugged in 210 in. for y and solved for x, getting 11.955 seconds. http://www.youtube.com/watch?v=QxSVM3E9gmY&sns=em
Time Distance
2 sec. 50.5 in.
5 sec. 83.5 in.
8 sec. 150 in.
11.955 sec. 210 in.
Time Distance
2 sec. 50.5 in.
5 sec. 83.5 in.
8 sec. 150 in.
11.955 sec. 210 in.
Ramp It Up DC #3
For Design Challenge 3, we were tasked with building a robot that could climb a 7' x 9'' plank at increasing degrees of steepness, with the final goal being a straight vertical climb. To begin, we brainstormed different ways to climb the board, and realizing we needed a lot of torque, we came up with our first design. With Mr. Croke's advice, we visited his website to learn how to correctly gear it to increase torque. If I were to do it again, I would time the ascent so it would stop exactly at the top, instead of falling and breaking.
http://www.youtube.com/watch?v=GuMhzE3qBH8
http://www.youtube.com/watch?v=GuMhzE3qBH8

Our program, which is simply moving in a straight line for 200 seconds. To make it more interesting, we added a selection of songs for the robot to play, including In the Hall of The Mountain King, Rocky, and the Can-Can.

Our initial prototype used a lot of gears in its front wheels, to have lots of torque. It only could get up the lowest ramp, because the wheels did not grip without weight behind them.

In light of the previous failure, we moved the motors to underneath the MindStorm, for the most possible weight. This was too top-heavy, and couldn't climb the second incline without tipping.
|

This second design was just adding more weight above the wheels, but it failed again; the weight was still not enough for it to grip the board.

After a brief research online, we completely redesigned our robot so the wheels would grip the sides, and a back piece to prevent it from falling off. However, without gears, it did not have enough torque to pull it up consistently.
|

Our final design, which worked excellently. The wheels wrapped around the back, and Legos in front kept them pressed against the board to drive straight up, with the gears to provide the torque for the heavy robot.
Bot Ball DC #4
Questions
1. Our task was to build a robot to compete other robots to remove three balls from the arena by picking them up and throwing them over the divider, within the three minute time limit.
2. Like always, we had the entire Lego set to work with, including the three motors, which we determined should go to the two wheels and a claw.
3. We started with the claw idea, try varying lengths of the arms for it to neatly pick up the ball. We also had to position the claw high enough that it could drop the ball over the wall.
4. Our final prototype is the Mind-storm supported on four wheels, with motors on the front two. We have a lengthy claw controlled by the third motor in the front. The claw has a hooked attachment that can extend over the divider to knock down or otherwise incapacitate the opposing robot.
5. At one point, our robot managed to flip itself over. After suggestions from other teams, we removed the top attachment, which made it too top-heavy, and changed the back wheels to provide more support.
6. This challenge taught us how to use three motors, instead of the usual two. Additionally, we learned the concept of controlling the robot through a cellular phone, instead of a predetermined program as per usual.
7. If we were to do the project again, I would try for a catapult structure, as opposed to a claw. After observation, it seems that this design picks up the balls just as quickly, but can get them over the divider faster and easier, with less turning required.
2. Like always, we had the entire Lego set to work with, including the three motors, which we determined should go to the two wheels and a claw.
3. We started with the claw idea, try varying lengths of the arms for it to neatly pick up the ball. We also had to position the claw high enough that it could drop the ball over the wall.
4. Our final prototype is the Mind-storm supported on four wheels, with motors on the front two. We have a lengthy claw controlled by the third motor in the front. The claw has a hooked attachment that can extend over the divider to knock down or otherwise incapacitate the opposing robot.
5. At one point, our robot managed to flip itself over. After suggestions from other teams, we removed the top attachment, which made it too top-heavy, and changed the back wheels to provide more support.
6. This challenge taught us how to use three motors, instead of the usual two. Additionally, we learned the concept of controlling the robot through a cellular phone, instead of a predetermined program as per usual.
7. If we were to do the project again, I would try for a catapult structure, as opposed to a claw. After observation, it seems that this design picks up the balls just as quickly, but can get them over the divider faster and easier, with less turning required.
