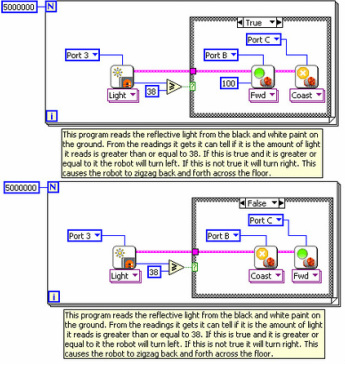
Line Follower DC # 8s


Ultrasonic Sensor DC # 9
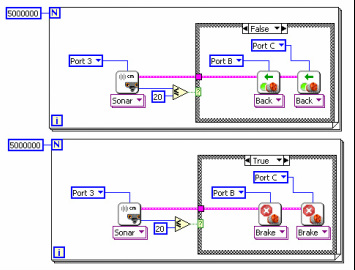
If the ultrasonic sensor detects no object in front of it, it reads as true, and the robot travels straight forward (our wheels were backwards). If an object is detected less than 20 units away, then the situation is "true", and both wheel stop in their tracks.
Touch Sensor DC # 10
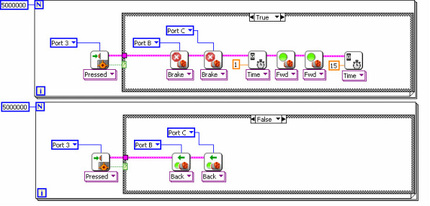
The front sensor, when engaged, prompts the "true" condition: Both wheels brake, then reverse after one second, for a total of 15 seconds. Whenever the sensor is not depressed, the "false" condition arises: both wheels just continually move forward. This entire true/false setup will repeat 50,000,000 times, or until we stop it.
Bugbot DC # 11
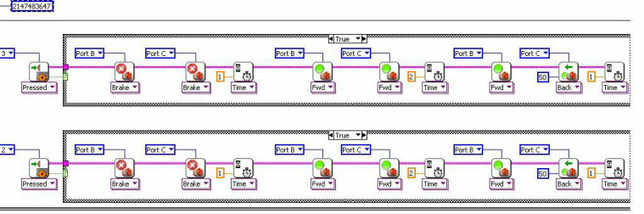
This program is similar to the previous one, except instead of just backing up when the sensor reads true, it also turns left or right for two seconds, depending on what sensor is triggered.
Search and Rescue DC # 12
No program was needed, as we controlled this through a cell phone.
Rope Climb DC # 13
| rope_climb.ppt |
Ultrasonic Obstacle Course DC # 14
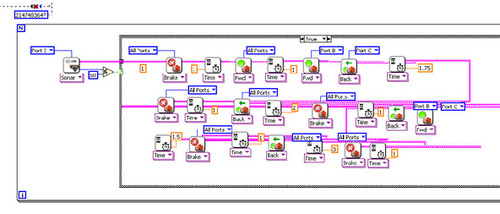
If the sonar detects an object in front of it, it registers as true. This leads to a series of complex instructions. First, the robot backs up and turns its way around the box to continue its course. The false situation just continues forward indefinitely. These two situations alternate for infinity, or until it stops.
Rock'em Sock'em Punch'em in the Gut Bot DC # 15
| rockem_sockem_punchem_in_the_gut.ppt |
The Neatest Kit You've Ever Seen

